
Comparison of Different Approaches for 3D Point Cloud Segmentation of an Urban Environment
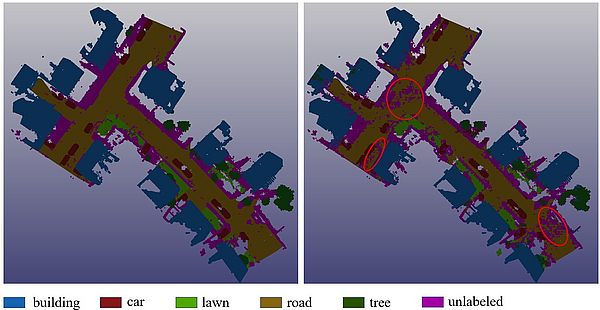
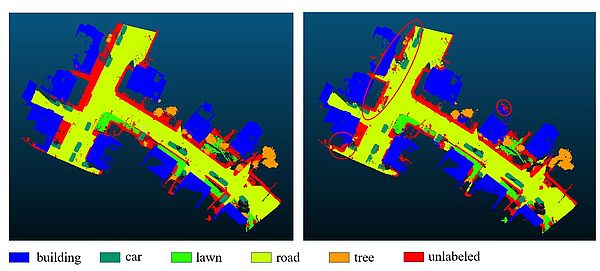
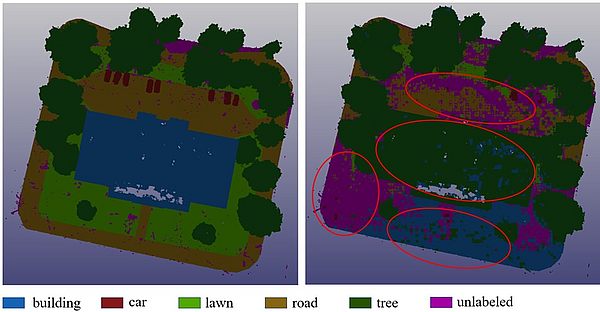
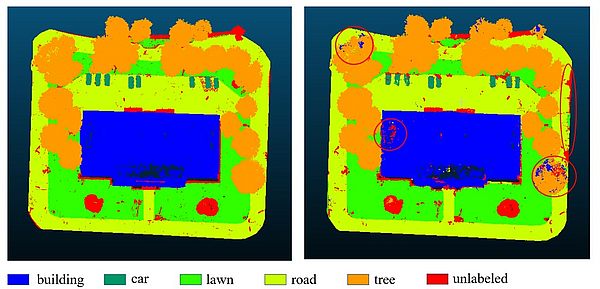
Recently, in the domain of computer vision and graphics, in addition to the 2D vision techniques, which is the already proven technique, the 3D representation and processing techniques become a new trend for research. The 3D point cloud as the raw data in 3D representation draws a great deal of attention. The data processing of 3D point clouds is significant as a research technology, especially point cloud semantic segmentation. There are numerous research topics referred to point cloud semantic segmentation dependent on deep learning networks in the last several years. In this paper, an overview of the deep learning-based approaches for point cloud semantic segmentation is provided. For a better understanding of semantic segmentation in urban environment, the comparison of different deep learning networks is made according to their performance with the use of various datasets. Moreover, an experiment of point cloud semantic segmentation is implemented. Our own 3D data is used to reproduce the scene segmentation test with PointNet and RandLA-Net in urban environment. PointNet is the pioneer work of point-based network, which has the architecture designed to directly deal with unstructured point cloud data. The whole procedure consists of preparing dataset, training, predicting as well as evaluating. Besides, RandLA-Net is also used for point cloud segmentation task in this research, and the segmentation result is compared with the one from PointNet. The web-based 3D content renders share a great popularity among the point clouds visualization methods. Considering the new trend of the visualization of point clouds, the WebGL based renderer, Potree is introduced and employed to visualize the georeferenced point clouds data. After segmentation experiment, the comparative results are obtained from PointNet and RandLA-Net. In PointNet, the results from Lemgo_Aula dataset are based on area 8 and 9 individually. 82.5% overall accuracy (OA) and 64.8% mean intersection over union (mIoU) are collected from area 8 in Lemgo, and 43.5% OA and 21.8% mIoU are collected from area 9 in Aula. The Stanford indoor dataset(S3DIS) is also tested in PointNet, and 86.0% OA and 64.1% mIoU are collected. In RandLA-Net, the Lemgo_Aula dataset is tested, and the OA is 91.7% and 94.2% in area 8 and 9 individually. The 84.2% mIoU is evaluated for area 8 and 9 at the same time in RandLA-Net. Finally, the conclusion about the development of point cloud semantic segmentation and visualization is made, and the results of this experiment of point cloud semantic segmentation based on PointNet and RandLA-net are also discussed.
Bearbeiter:
Haobin Liu
Betreuer:
Yu Lan and Prof. Dr. Jens-André Paffenholz
1. Gutachter und Betreuer:
Prof. Dr. Jens-André Paffenholz
2. Gutachter:
Prof. Dr. Benjamin Säfken